


Blaze
Recent Profile Visitors
1,216 profile views

Blaze's Achievements
0
Reputation
-
Sorry this wasn't helpful, I've tried to extract the paths I am generating in my project in a codepen, they are all auto generated, that's basically what I am doing, but I can't get it to come up with the same warning in the codepen. I'm not sure what is causing the problem also bear in mind I have to run my set up for days before I see this happening, I'll keep an eye on it https://codepen.io/blaze747/pen/MWYZLLb
-
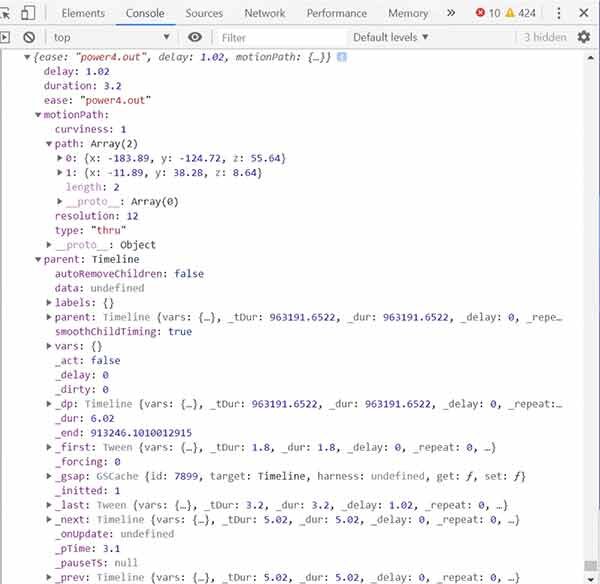
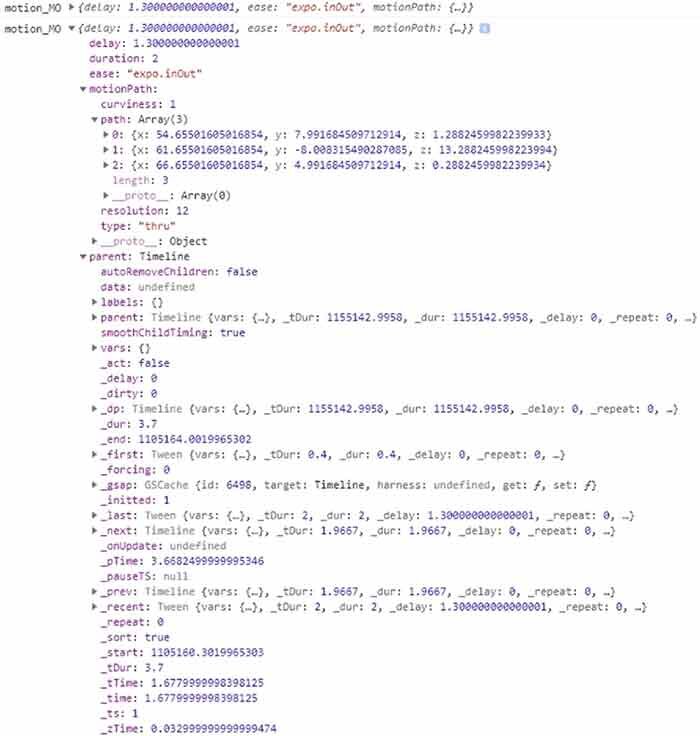
Had to run it for a while to see this happening again, I've got basically about 1500 3d points flying around on different motion paths at the same time. All motion paths are very similar. Up to three x/y/z coordinates. Thank you for checking this out!
-
-

-
-

-
 Blaze changed their profile photo
Blaze changed their profile photo -
I keep seeing this once in a while since I've updated my project from GSAP2 bezier to GSAP3 motionPath. When I hit the play button it continues ok, so doesn't seem to be critical. Never seen that on GSAP2.
-
Thanks for the tip, makes sense, I'll set it up that way
-
Hi there, I'm trying to set up a 3d planet which can be rotated by the user by dragging it left right horizontally. At first glance throwProps seems ideal for it, but I don't want the planet to stop rotating. If I understand right throwProps will always come to a full stop? But I need the planet to carry on rotating endlessly at a minimum speed if the user stops interacting. If the user drags it again into some direction, the planet should go faster then go back into it's endless rotation minimum speed. I've looked into physicsProps, by setting the time to some very high value and the velocity to some set number, it rotates fine, but as soon as I set the acceleration it will just carry on going faster and faster, similar story with friction. Is there a way to specify a max ceiling speed and minimum speed for physicsProps? I've also tried an initial sine in tween followed by a linear tween on a loop, which isn't very far from what I am trying to achieve, but there's an obvious little glitch in speed when the sine in tween meets the linear tween. I wonder if I'm approaching this problem from the right angle and such a set up feasible with Greensocks? Which I bet it is... ; ) Any tips much appreciated!